
Go to the source code of this file.
Functions | |
| void | cg3d::testShape (const Shape3d &s) |
| Test this shape for validity. | |
| bool | earlyExit (PointSet3d *pset, const Shape3d &shape0, const Shape3d &shape1) |
| void | cg3d::intersect (PointSet3d *ps, const Shape3d &shape0, const Shape3d &shape1, Planar3dDest &faceDest) |
| Compute the surface of the intersection of these two shapes, sending the resulting face fragments to faceDest. | |
| double | cg3d::tetVolume (const CkVector3d &A, const CkVector3d &B, const CkVector3d &C, const CkVector3d &D) |
| Return the volume of the tetrahedron with these vertices. | |
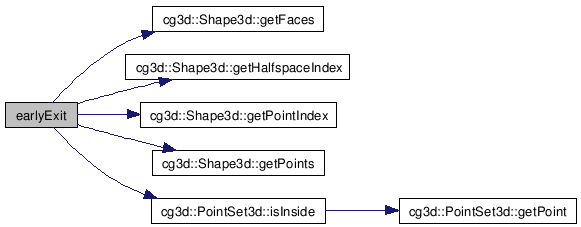
| bool earlyExit | ( | PointSet3d * | pset, | |
| const Shape3d & | shape0, | |||
| const Shape3d & | shape1 | |||
| ) |
Definition at line 206 of file cg3d.C.
References cg3d::Shape3d::getFaces(), cg3d::Shape3d::getHalfspaceIndex(), cg3d::Shape3d::getPointIndex(), cg3d::Shape3d::getPoints(), cg3d::Tet3d::h, cg3d::PointSet3d::isInside(), cg3d::Tet3d::p, and cg3d::Shape3d::ps.
Referenced by cg3d::intersect().

 1.5.5
1.5.5